|
|
Tomas Pajdla
Associate Professor & Distinguished Researcher, Leader of AAG Group AAG - Applied Algebra & Geometry Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague National Institute of Informatics, Tokyo
|
CVF Member |
||||||
|
|
|
|||||||
|
News |
|
|
|
|||||
|
|
|
|||||||
|
2020 Nov ACCV 2020 Program Chair 2020 Sep ELLIS Unit @ CIIRC established 2020 Sep ECCV 2020 4 papers (1 spotlight) 2020 Jun CVPR 2020 3 papers (1 oral) 2019 Oct ICCV 2019 Best Student Paper
|
Interests |
Computer Vision, Applied Algebraic Geometry, Machine Learning, Robotics, Optimization |
||||||
|
Papers |
||||||||
|
Talks |
Minimal Problems in
Computer Vision @ ICERM 2018, Algebraic Geometry
& 3D Reconstruction @ ISPRS 2016, |
|||||||
|
Teaching |
Geometry of Computer
Vision and Computer Graphics (CTU in Prague), Advanced Robotics (CTU in Prague), |
|||||||
|
Links |
||||||||

|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
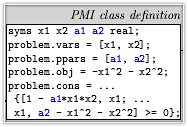
Minimal problem classification in M2 Automatic Generator of Minimal Solvers CMP SfM Webservice GpoSolver – Global Polynom Optimization radhomo-0.1 – Rad Dist Homogrphy [pdf] F10-0.1 – Rad Relative Pose [pdf] bbhec – BB Hand-Eye Optimization mpherwc – Hand-Eye & R-W Cal [pdf] minhec – Hand-Eye Cal Minimal [pdf] polyopt – Polynom Opt by SDP Relax TE-inversion – Uncertainty propag in SfM
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2019 SPRING project (H 2020 EU) 2019 ARtwin project (H 2020 EU) 2017 2017 IMPACT Project (EU & MSMT) 2017 2016 LADIO Project (H2020 EU)
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||










|
Research topics for PhD, MSc and BSc students. |
|
|
|
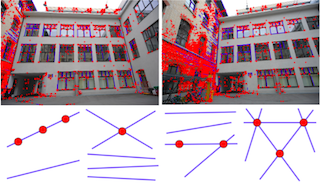
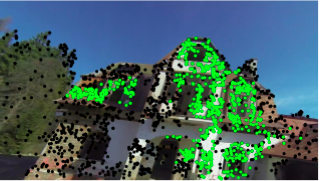
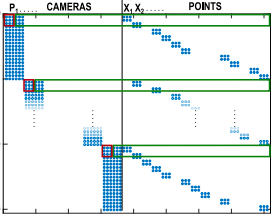
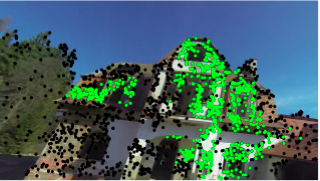
3D Scene Reconstruction from Images 3D scene reconstruction from images is a fundamental problem of
computer vision. It finds many applications in industry ranging from
autonomous driving to movie special effects. The topic is best for students
with interest in algorithms, experimental work, and engineering of really
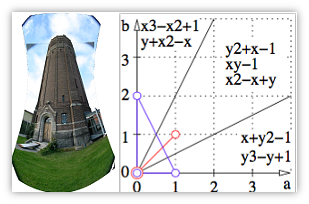
working systems. Algebraic techniques have proved very useful in solving
difficult problems in geometry of computer vision. We will aim at studying
more advanced elements of algebraic geometry and applying them to real
engineering problems. The topic is best for students with interest in applied
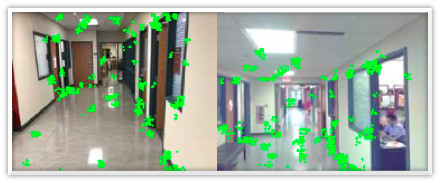
mathematics. Visual scene recognition and image-based localization is an important problem in computer vision and machine learning. We will aim developing new approaches to place representation and its search. The topic is suitable for students with interest computer vision and machine learning applied to real engineering problems. Polynomial Optimization in Computer Vision and Robotics Polynomial optimization techniques proved very useful in solving interesting problems in geometry of computer vision and robotics. We will aim at studying more polynomial optimization techniques and applying them in computer vision and robotics. The topic is suitable for students with interest in applied mathematics but used on real engineering problems. |
|
|
|
|
2019 Oct ICCV 2019 1 oral + 2 papers, 2019 Oct ICCV 2019 3DRW workshop, 2019 Aug SPRING H2020 project granted, 2019 Jun CVPR 2019 paper, 2019 Mar ARtwin H2020 Project granted, 2018 December ELLIS Founded, Papers @ NeurIPS 2018 & ACCV 2018, 2018 Sep-Dec. 2019 Feb/May, Visiting ICERM @ Brown University, 2018 September Paper @ ECCV 2018, 2018 June 3 Papers @ CVPR 2018, 2018 June Minimal Problems Tutorial, 2018 June CVPR 2019 Workshop on Autonomous driving, 2018 June CVPR 2019 Workshop on LT Visual Localization ,2018 March GC of 3DRW Workshop @ ECCV 2018, 2017 September Continental project, 2017 September PC of 3DV 2018, 2017 July J Heller received CSKI Prize 4 his PhD, 2017 July 3 Papers @ CVPR 2017, 2017 June IMPACT project with INRIA started, 2017 May MAGIK Eye – CTU Common Lab founded, 2016 November PC of ACCV 2020, June 2016 3 papers @ CVPR 2016, June 2015 3 papers @ CVPR 2015, January 2015 LADIO EU Project starts. |
|
|
|
©Tomas Pajdla 2017-2021 |